BOSM -6025 Kontraŭkapa Boring Milling Machine
1. Ekipaĵouzi:
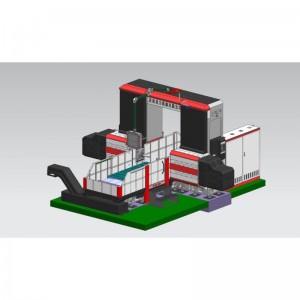
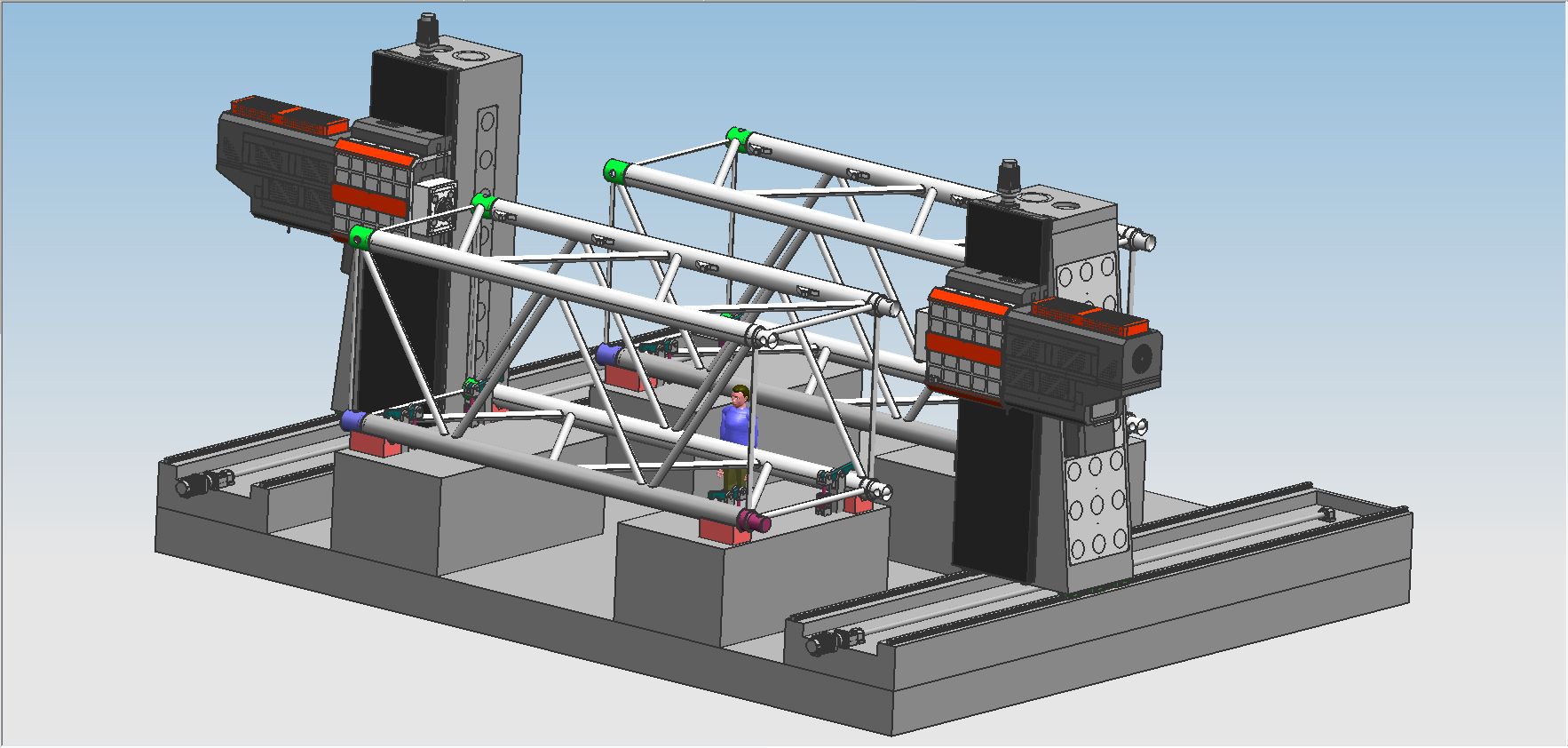
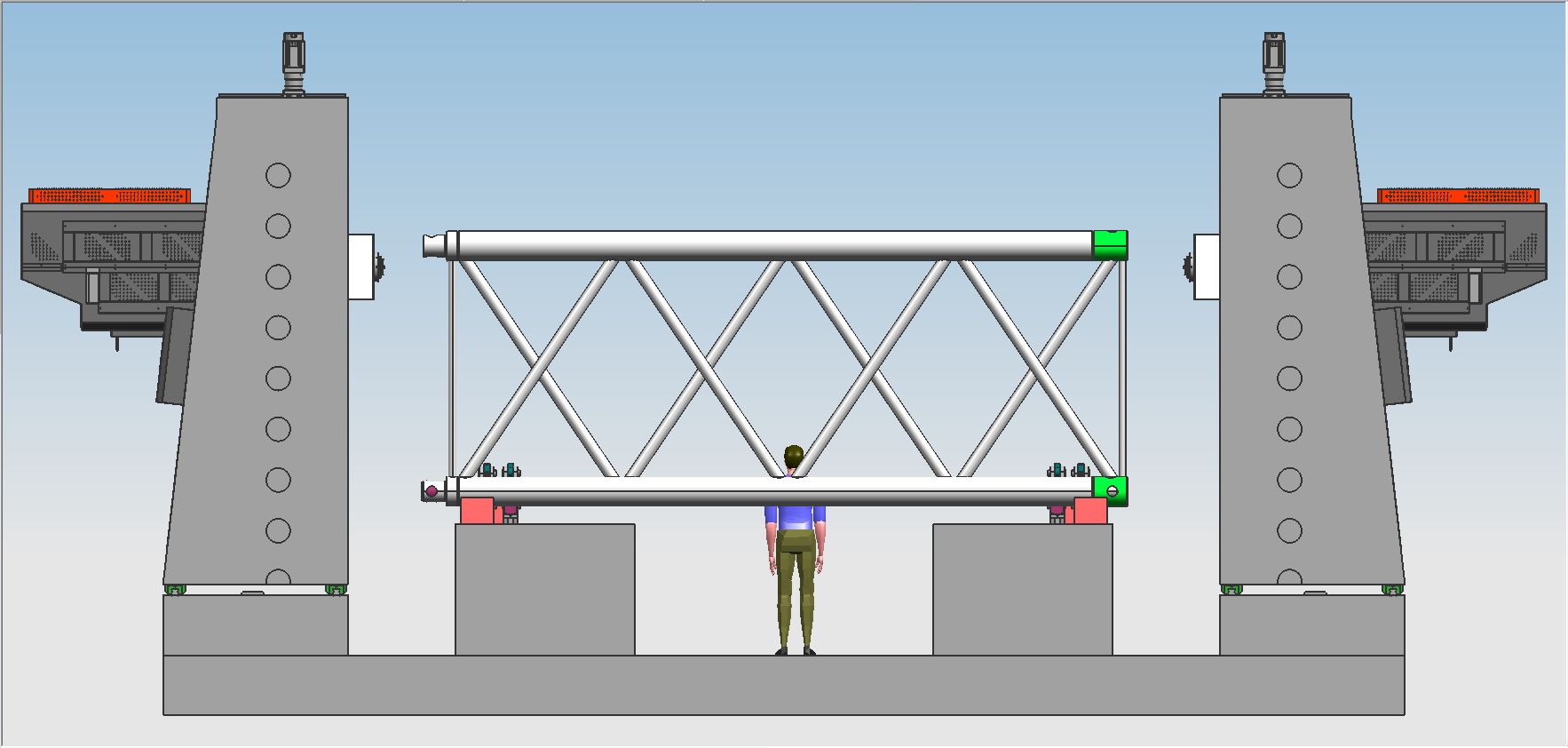
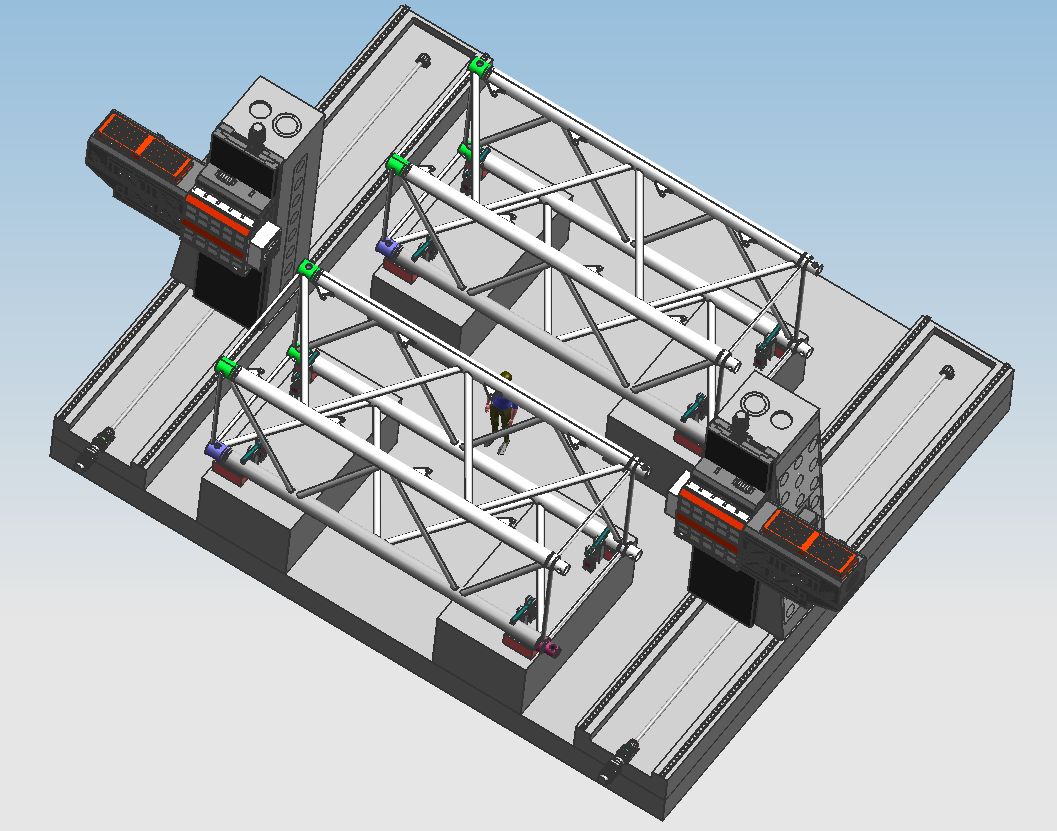
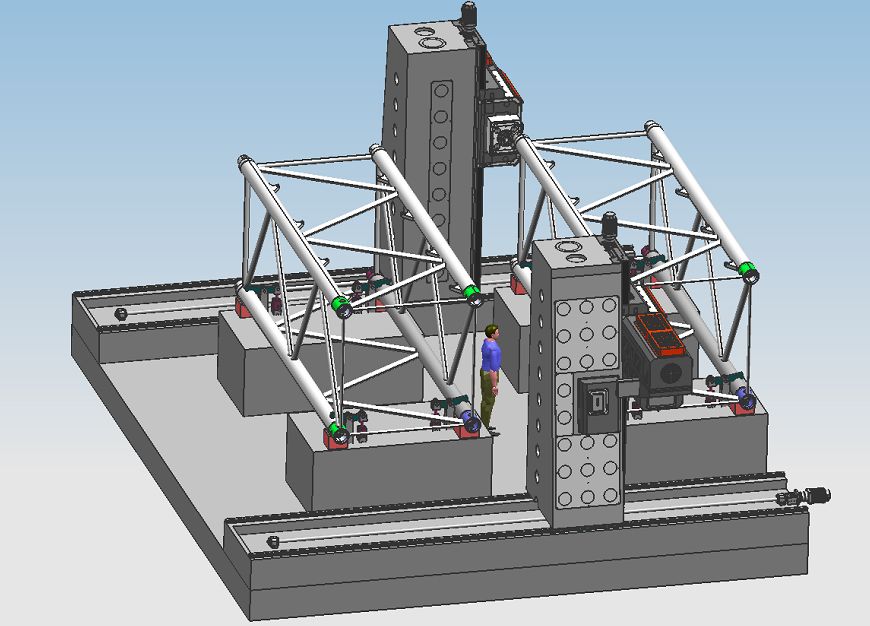
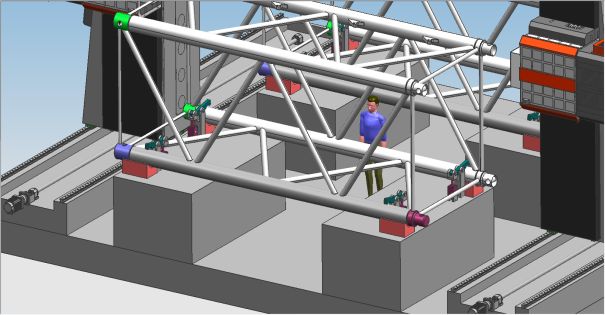
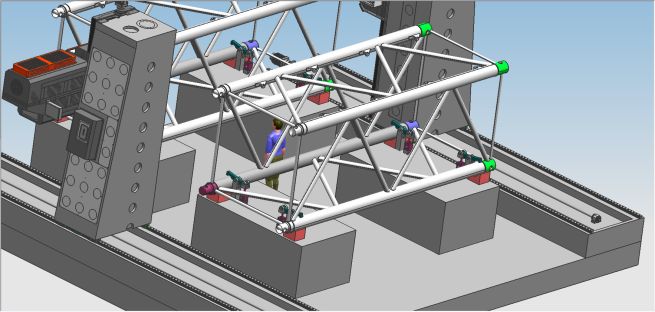
BOSM-6025 duobla stacio, CNC vertikala kolumno movebla duobla kolumna kapo-al-kapa enuiga kaj frezmaŝino estas speciala maŝinilo por simetriaj laborpecoj de konstrua maŝinaro.La maŝinilo estas ekipita per speciala movebla kolumno kaj du aroj da horizontalaj virŝafoj, kiuj povas realigi Boradon, mueladon, enuadon kaj alian prilaboradon de la laborpeco ene de la efika streka gamo, la laborpeco povas esti prilaborita samtempe (ne necesas). por malĉefa krampo), rapida ŝarĝo kaj malŝarĝo rapideco, rapida poziciiga rapideco, alta pretiga precizeco kaj alta pretiga efikeco.
2. Strukturo de ekipaĵo:
2.1. Ĉefaj komponantoj de la maŝinilo
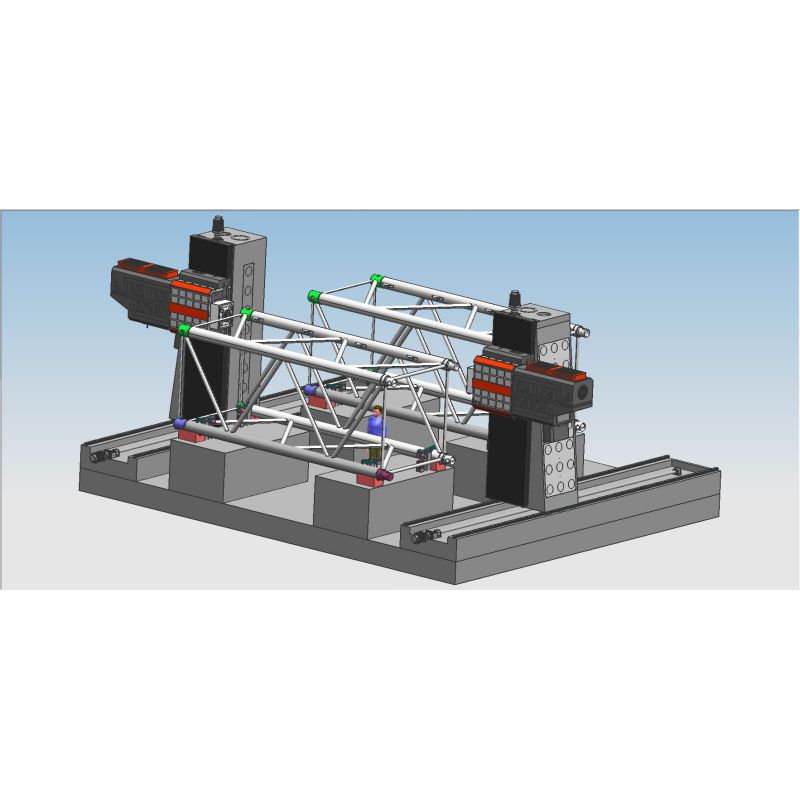
Lito, laborbenko, maldekstraj kaj dekstraj kolumnoj, traboj, seloj, virŝafoj kaj aliaj grandaj partoj estas ĉiuj faritaj el rezina sablomuldado, altkvalita griza fero 250 fandado, kalzita en varma sablofosaĵo→vibra maljuniĝo→varma forno-maljuniĝo→vibra maljuniĝo→ malglata maŝinado→ Vibra maljuniĝo→varma forno annealing→vibra maljuniĝo→finado, tute forigu la negativan streson de la partoj, kaj tenu la agadon de la partoj stabila.La maŝinilo havas funkciojn kiel muelado, borado, borado, kontraŭfrapado, ktp., kaj la metodo de malvarmigo de ilo estas ekstera malvarmigo, La maŝinilo enhavas 6 aksojn de nutrado, kiuj povas realigi 4-aksajn ligojn kaj 6-aksajn unu-aksojn. ago.Estas 2 potencaj kapoj.La aksa direkto de la maŝinilo kaj la potenca kapo estas montritaj en la suba figuro.
2. 2La ĉefa strukturo de la aksa transdono nutra parto
2.2.1 X 1/X2 akso: La kolono reciprokas laŭlonge laŭ la gvidrelo de la fiksa lito.
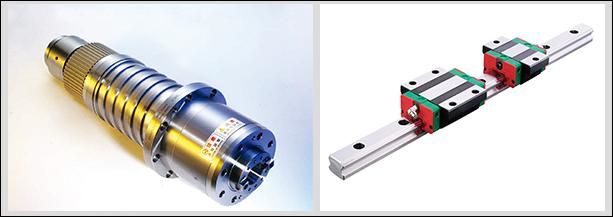
Transdono de X-akso: AC-servomotoro kaj alt-precizeca planeda reduktilo estas uzataj por movi la du kolumnojn tra la pilkŝraŭbo-transsendo por realigi la linearan moviĝon de la X-akso.
Gvida fervoja formo: kuŝu du alt-fortaj precizecaj liniaj gvidreloj.
2.2.2 Y1-akso: La potenca kapo kaj virŝafo estas vertikale instalitaj sur la antaŭa flanko de la kolono, kaj reciprokas maldekstren kaj dekstren laŭ la gvidrelo de la kolono.
Transdono de Y1-akso: AC-servomotoro estas uzata por movi la pilkan ŝraŭbon por movi la selon por movi, kaj realigi la linearan movon de Y1-akso.
Gvida fervoja formo: 4 linearaj gvidreloj + malmola fervoja kvadrata virŝafo kombinita.
2.2.3 Y2-akso: La dua virŝafo de la potenca kapo estas instalita vertikale sur la antaŭa flanko de la kolono, kaj reciprokas maldekstren kaj dekstren laŭ la gvidrelo de la kolono.
Transdono de Y2-akso: AK-servomotoro estas uzata por movi la pilkŝraŭbon por movi la selon por moviĝi, kaj realigi la linearan movon de Y2-akso.
Gvida fervoja formo: 4 linearaj gvidreloj + malmola fervoja kvadrata virŝafo kombinita.
2.2.4 Z1-akso: La potenca kapo glitanta selo estas instalita vertikale sur la antaŭa flanko de la dekstra kolono, kaj reciprokas supren kaj malsupren laŭ la kolona gvidrelo.
Z1-aksa transdono: AC-servomotoro kaj alt-precizeca planeda reduktilo estas uzataj por movi la virŝafon movi tra la pilka ŝraŭbo por realigi Z1-aksa lineara movo.
Gvidrelo formo: 2 linearaj gvidreloj.
2.2.5 Z2-akso: La potenco-kapa glitselo estas instalita vertikale sur la antaŭa flanko de la dekstra kolono, kaj reciprokas supren kaj malsupren laŭ la kolona gvidrelo.
Z1-aksa transdono: AK-servomotoro plus alt-precizeca planeda reduktilo estas uzata por movi la virŝafon movi tra la pilka ŝraŭbo por realigi Z2-aksa lineara movo.
Gvidrelo formo: 2 linearaj gvidreloj
La enuiga kaj muelada potenca kapo (inkluzive de la potenca kapo 1 kaj 2) estas kunmetita kvadrata virŝafo, kaj la moviĝanta direkto estas gvidata de 4 linearaj rulaj gvidreloj.La stirado uzas AC-servomotoron por movi la precizecan pilkan ŝraŭbparon.La maŝino estas ekipita per nitrogena ekvilibra stango., Redukti la portantan kapablon de la maŝino kapo sur la ŝraŭbo kaj servomotoro.La Z-aksa motoro havas aŭtomatan bremsan funkcion.Okaze de elektropaneo, la aŭtomata bremso tenos la motorŝafton firme tiel ke ĝi ne povas rotacii.Laborante, kiam la borilo ne tuŝas la laborpecon, ĝi rapide manĝos;kiam la borilo tuŝas la laborpecon, ĝi aŭtomate ŝanĝas al funkcianta nutraĵo.Kiam la borilo penetras la laborpecon, ĝi aŭtomate ŝanĝos al rapida rebobeno;kiam la fino de la borilo forlasas la laborpecon kaj atingas la fiksitan pozicion, ĝi moviĝos al la sekva truopozicio por realigi aŭtomatan cirkuladon.Kaj ĝi povas realigi la funkciojn de blinda truo borado, muelado, chamfering, blatrompado, aŭtomata blato forigo, ktp, kiu plibonigas laboran produktivecon.


La 500mm streko kunmetita kvadrata virŝafo-potenckapo uzas linearajn gvidilojn anstataŭ tradiciaj enigaĵoj por multe plibonigi la gvidan precizecon konservante la rigidecon de la kvadrata virŝafo.
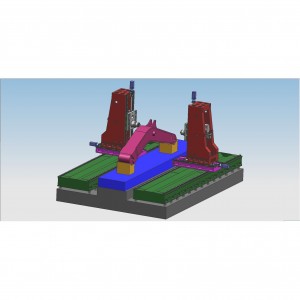
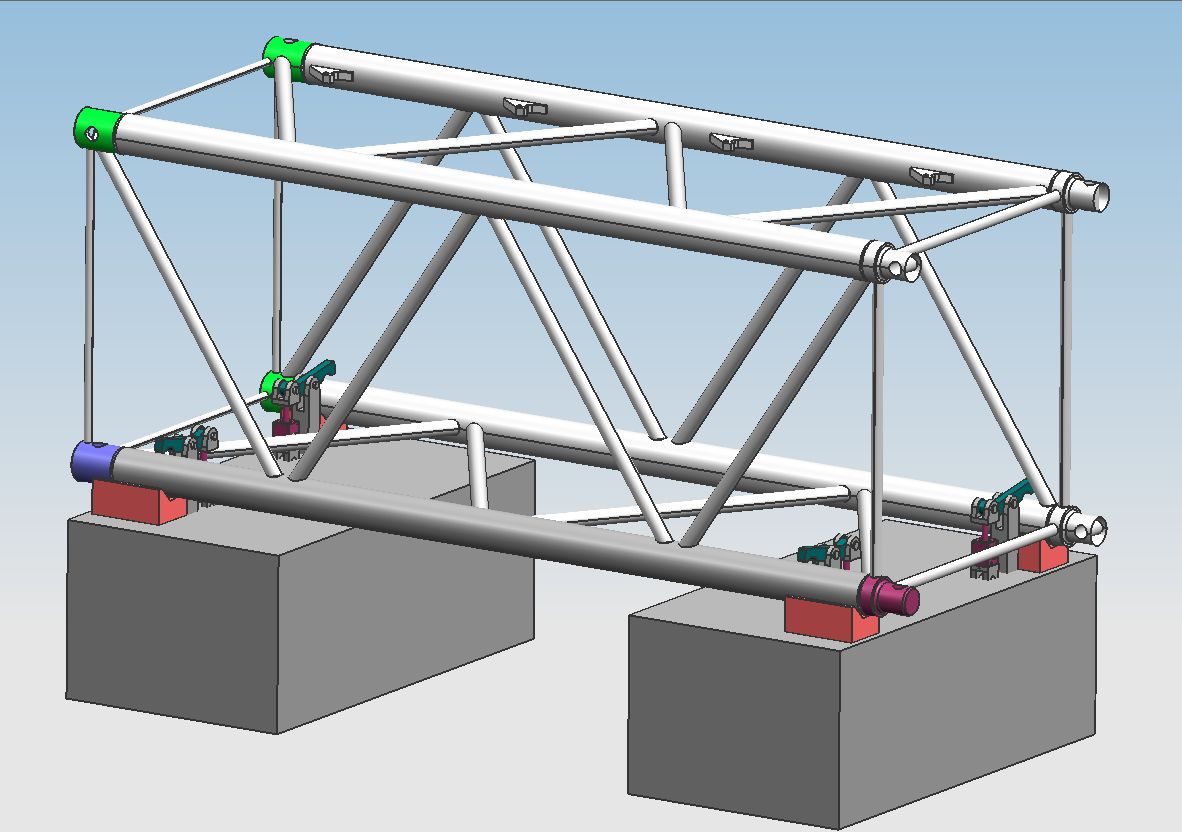
2.3. Laborpeco hidraŭlika streĉa funkcio
2.4Forigo de blatoj kaj malvarmigo
Estas spiralaj kaj plataj ĉenaj blattransportiloj instalitaj ambaŭflanke sub la laborbenko, kaj la blatoj povas esti aŭtomate elŝutitaj al la blattransportilo ĉe la fino tra du stadioj de spiralaj kaj ĉenaj platoj por realigi civilizitan produktadon.Estas malvarmiga pumpilo en la fridiga tanko de la peceta transportilo, kiu povas esti uzata por ekstera malvarmigo de la ilo por certigi la agadon kaj servon de la ilo, kaj la fridigaĵo povas esti reciklita.
3. Plena cifereca nombra kontrola sistemo:
3.1.Kun ĉipeta rompanta funkcio, peceto-rompanta tempo kaj blato-rompa ciklo povas esti agordita sur la hom-maŝino interfaco.
3.2.Kun ila leva funkcio, la ila leva distanco povas esti agordita sur la interfaco homo-maŝino.Kiam la prilaborado atingas ĉi tiun distancon, la ilo estos rapide levita, tiam blatoj estos ĵetitaj, kaj tiam rapide antaŭen al la boranta surfaco kaj aŭtomate konvertitaj al laboro.
3.3.Alcentrigita operacia kontrolo-skatolo kaj portebla unuo adoptas cifersistemon kaj estas ekipitaj per USB-interfaco kaj LCD-likva kristala ekrano.Por faciligi programadon, stokadon, ekranon kaj komunikadon, la operacia interfaco havas funkciojn kiel hom-maŝina dialogo, erarkompenso kaj aŭtomata alarmo.
3.4.La ekipaĵo havas la funkcion antaŭrigardi kaj reinspekti la truan pozicion antaŭ prilaborado, kaj la operacio estas tre oportuna.
4.Aŭtomata lubrikado
Maŝinaj iloj precizecaj linearaj gvidaj fervojaj paroj, precizecaj pilkaj ŝraŭbaj paroj kaj aliaj altprecizaj movaj paroj estas ekipitaj per aŭtomataj lubrikaj sistemoj.La aŭtomata lubrika pumpilo eligas preman oleon, kaj la kvanta lubrika oleo-ĉambro eniras la oleon.Post kiam la oleoĉambro estas plenigita per oleo, kiam la sistema premo altiĝas al 1.4-1.75Mpa, la premoŝaltilo en la sistemo estas fermita, la pumpilo haltas, kaj la malŝarĝa valvo malŝarĝas samtempe.Kiam la oleopremo en la vojo falas sub 0.2Mpa, la kvanta lubrikilo komencas plenigi la lubrikan punkton kaj kompletigas unu oleoplenigon.Pro la preciza oleoprovizo de la kvanta oleo-injekciilo kaj la detekto de la sistema premo, la oleoprovizo estas fidinda, certigante ke estas oleofilmo sur la surfaco de ĉiu kinematika paro, reduktante frotadon kaj eluziĝon, kaj malhelpante la damaĝon al la interna strukturo kaŭzita de recalentado, por certigi la precizecon kaj vivon de la maŝinilo.Kompare kun la glita gvida fervoja paro, la ruliĝanta lineara gvida fervoja paro uzata en ĉi tiu maŝinilo havas serion da avantaĝoj:
① Alta moviĝ-sentemo, la frota koeficiento de la ruliĝanta gvidrelo estas malgranda, nur 0,0025-0,01, kaj la veturpovo estas tre reduktita, kio estas nur ekvivalenta al 1 el ordinaraj maŝinoj./10.② La diferenco inter dinamika kaj statika frotado estas tre malgranda, kaj la sekva agado estas bonega, tio estas, la tempointervalo inter la vetursignalo kaj la mekanika ago estas ekstreme mallonga, kio helpas plibonigi la respondrapidecon kaj sentemon de la sistemo de nombra kontrolo.
③Ĝi taŭgas por altrapida lineara moviĝo, kaj ĝia tuja rapideco estas ĉirkaŭ 10 fojojn pli alta ol tiu de glitaj gvidreloj.④ Ĝi povas realigi senpagan movadon kaj plibonigi la movan rigidecon de la mekanika sistemo.⑤ Produktita de profesiaj fabrikistoj, ĝi havas altan precizecon, bonan versatilecon kaj facilan prizorgadon.
5.Aksa lasera inspektado:
Ĉiu maŝino de Bosman estas kalibrita de la lasera interferometro de la kompanio RENISHAW en Britio por precize inspekti kaj kompensi la tonaltan eraron, kontraŭreagon, poziciantan precizecon, ripetan pozician precizecon, ktp., por certigi la dinamikan, statikan stabilecon kaj pretigan precizecon de la. maŝino.Ballbar-inspektado Ĉiu maŝino uzas pilkstangon de brita RENISHAW-kompanio por kalibri la veran cirklan precizecon kaj maŝinan geometrian precizecon, kaj fari cirkulajn tranĉajn eksperimentojn samtempe por certigi la 3D-maŝinan precizecon kaj cirklan precizecon de la maŝino.


6.Maŝina ila medio:
6.1.Postuloj pri medio de uzo de ekipaĵoj
Subteni konstantan nivelon de ĉirkaŭa temperaturo estas esenca faktoro por precizeca maŝinado.
(1) La uzebla kondiĉo de ĉirkaŭa temperaturo estas -10 ℃ ~ 35 ℃, kiam la ĉirkaŭa temperaturo estas 20 ℃, la humideco devas esti 40 ~ 75%.
(2) Por konservi la statikan precizecon de la maŝinilo ene de la specifita gamo, la optimuma ĉirkaŭa temperaturo postulas 15 °C ĝis 25 °C, kaj la temperaturdiferenco.
Ne devas superi ±2°C/24h.
6.1.2.Elektra tensio: 3 fazoj, 380V, ene de la gamo de ±10% tensio fluktuo, nutrado ofteco: 50HZ.
6.1.3.Se la tensio en la areo de uzo estas malstabila, la maŝinilo devas esti ekipita per stabiligita nutrado por certigi la normalan funkciadon de la maŝinilo.
6.1.4.La maŝinilo devas havi fidindan teron: la terdrato estas kupra drato, la drato-diametro ne devas esti malpli ol 10mm², kaj la terrezisto estu malpli ol 4 Ω.
6.1.5.Por certigi la normalan laboran agadon de la ekipaĵo, se la kunpremita aero de la aerfonto ne povas plenumi la postulojn de la aerfonto, ĝi devus esti instalita sur la maŝinilo.
Aldonu aron da aerfonto-puriga aparato (malhumidiĝo, degresado, filtrado) antaŭ la aero.
6.1.6.Konservu la ekipaĵon for de rekta sunlumo, vibro kaj varmofontoj, altfrekvencaj generatoroj, elektraj veldaj maŝinoj, ktp., por eviti malsukceson de produktado de maŝiniloj aŭ perdo de precizeco de maŝiniloj.
7.TTeknikaj parametroj:
| Modelo | 6025-6Z | |
| Prilaborado de laborpeco | Longo × larĝo × alto (mm) | 6000× 2300×2300 |
| Gantry maksimuma nutrado | Larĝo (mm) | 6800 |
| labortablo grandeco | Longo X Larĝo (mm) | 3000*1000 =4 |
| Kolumna vojaĝo | Kolumno moviĝas tien kaj reen (mm) | 7000 |
| Duobla virŝafo levo supren kaj malsupren | Supren kaj malsupren baton de virŝafo (mm) | 2500 |
| Spindcentro al tablo-ebena distanco | 0-2500mm | |
|
Horizontala virŝafa boradkapo potenco kapo unu du
| Kvanto (2) | 2 |
| Spindelo mallarĝa | BT50 | |
| Borada diametro (mm) | Φ2-Φ60 | |
| Frapa diametro (mm) | M3-M30 | |
| Spindrapideco (r/min) | 30~5000 | |
| Servospindela motorpotenco (kw) | 37*2 | |
| Maldekstra kaj dekstra vojaĝdistanco inter du spindelfinoj | 5800-6800mm | |
| Maldekstra kaj dekstra bato de virŝafo (mm) | 500 | |
| Dudirekta Pozicia Precizeco | 300mm * 300mm | ± 0,025 |
| Dudirekta ripetita poziciiga precizeco | 300mm * 300mm | ± 0,02 |
| Maŝinaj Ilaj Dimensioj | Longo × larĝo × alto (mm) | Laŭ la desegnoj (se estas ŝanĝoj en la desegna procezo, ni sciigos vin) |
| Malneta pezo (t) | 72T | |